





Presenter: Prof. Ayse Tekes, Kennesaw State University
Connor Talley, Kennesaw State University
Lucas Schwenck, Kennesaw State University
Duration: 2h; Prerequisites: None; Schedule: TBD
Cost: $150 IEEE Members / $300 Non-members / $100 Students
![]() Abstract. Kinematic and dynamic modeling of mechanisms is essential for optimizing their geometry and controlling their motion. However, deriving the mathematical model becomes increasingly complex as the design’s complexity and degree of freedom of motion increase. Advancements in additive manufacturing and technology have enabled us to design and develop compliant mechanisms and soft robots. Soft robotics is an emerging technology with superiorities over traditionally designed rigid robotics. A soft robot is characterized by several distinctive features such as elastic bodies, increased degree of freedom due to their large deflection, fabrication by unconventional materials, and the inclusion of intrinsic passive elements. Compliant mechanisms, which are considered the center of soft robotics, comprise flexible components that go under elastic deformation to accomplish desired tasks. This inherent property of compliant mechanisms leads to compelling advantages such as creating highly repeatable motion for high precision applications (more like flexible linkages) and possessing a high degree of freedom motion that cannot be achieved by traditional rigid mechanisms (such as soft robots). They form the base of soft robotics, or alternatively, soft robotics can be seen as an application area of high mobility flexible mechanisms. Despite their advantages and superiorities over rigid mechanisms, optimizing the stiffness of flexible links and dynamic properties of complex and high-mobility designs is increasingly challenging. Additionally, the largest challenge in the design and modeling of compliant mechanisms is understanding the deformation of the two bodies when connected along with their interaction in complex cases. Simscape is a toolbox in MATLAB that consists of a library to design and simulate mechanical and electromechanical systems. The toolbox allows the user to design complex rigid, compliant, and soft mechanisms while animating the motion in the mechanics explorer.
Abstract. Kinematic and dynamic modeling of mechanisms is essential for optimizing their geometry and controlling their motion. However, deriving the mathematical model becomes increasingly complex as the design’s complexity and degree of freedom of motion increase. Advancements in additive manufacturing and technology have enabled us to design and develop compliant mechanisms and soft robots. Soft robotics is an emerging technology with superiorities over traditionally designed rigid robotics. A soft robot is characterized by several distinctive features such as elastic bodies, increased degree of freedom due to their large deflection, fabrication by unconventional materials, and the inclusion of intrinsic passive elements. Compliant mechanisms, which are considered the center of soft robotics, comprise flexible components that go under elastic deformation to accomplish desired tasks. This inherent property of compliant mechanisms leads to compelling advantages such as creating highly repeatable motion for high precision applications (more like flexible linkages) and possessing a high degree of freedom motion that cannot be achieved by traditional rigid mechanisms (such as soft robots). They form the base of soft robotics, or alternatively, soft robotics can be seen as an application area of high mobility flexible mechanisms. Despite their advantages and superiorities over rigid mechanisms, optimizing the stiffness of flexible links and dynamic properties of complex and high-mobility designs is increasingly challenging. Additionally, the largest challenge in the design and modeling of compliant mechanisms is understanding the deformation of the two bodies when connected along with their interaction in complex cases. Simscape is a toolbox in MATLAB that consists of a library to design and simulate mechanical and electromechanical systems. The toolbox allows the user to design complex rigid, compliant, and soft mechanisms while animating the motion in the mechanics explorer.
This workshop will guide participants through the steps to design and develop models in MATLAB Simscape, a tool that facilitates rapid analysis.
Bio:
Porf. Ayse Tekes is an associate professor in the mechanical engineering department at Kennesaw State University. Her research interests lie in the areas of design, development, modeling, and control of compliant mechanisms and soft robots and improving student understanding by developing 3D-Printed laboratory equipment for vibrations and control theory courses and creating MATLAB Apps for Vibrations and Control in Simscape for undergraduate engineering courses.
Connor Talley is a PhD student at Kennesaw State University and his research lies within the fields of design, development, and modeling of compliant mechanisms and soft robots.
Lucas Schwenck is an undergraduate student in the mechanical engineering department at Kennesaw State University. His research interests include.
Presenter: Dr. Soheyla Amirian, University of Georgia
Duration: 4h; Prerequisites: None; Schedule: TBD
Cost: $300 IEEE Members / $600 Non-members / $200 Students
Travel Award. Two travel awards available (in the amount of $250 each) are available for two members/students of a group or community that are underrepresented in developing or utilizing artificial intelligence (AI), machine learning, and deep learning medical image analysis. When you register for this workshop, you can apply to request this award. For more details and to apply for this opportunity, please contact Dr. Anne Costolanski (anne.costolanski@gmail.com).
Abstract. Artificial intelligence (AI) has already demonstrated very successful performance in a variety of healthcare settings, ranging from disease diagnosis to predicting patient and clinical outcomes. However, the “black-box” nature of many AI algorithms can pose challenges in clinical applications, where AI-powered decisions need to be clearly justified and understood. eXplainable AI (XAI) addresses these concerns by making AI models more explainable, transparent, interpretable, and accountable. As the healthcare industry increasingly adopts AI technologies to improve diagnosis, treatment, and patient care, the need for transparency and interpretability in AI systems has become paramount. This half day tutorial on “eXplainable AI (XAI) in Clinical Applications” will delve into the intersection of AI and healthcare, mainly focusing on the critical aspect of XAI.
Programming Language/Packages: Python/PyTorch.
Bio. Dr. Amirian is currently a faculty fellow at the Institute for Artificial Intelligence and a faculty lecturer at the School of Computing, University of Georgia, where she is also leading the UGA Applied Machine Intelligence Initiatives & Education (AMIIE) Laboratory, working with a multidisciplinary team to build artificial intelligence (AI) and data-driven machine learning (ML) algorithms in different real-world settings, such as public health, imaging informatics, and AI-powered education. Dr. Amirian is the 2023 IEEE Atlanta Section Outstanding Educator awardee, and the 2019 CSCI Outstanding Achievement awardee, and she was named a finalist for the 2020 NCWIT (National Center for Women and Information Technology) Collegiate Award. Of late, she has authored 25+ peer-reviewed publications and has organized several conferences and tutorials on computational intelligence (e.g., ISVC), serving as the Co-Chair of Research Tracks at the World Congress in Computer Science, Computer Engineering, and Applied Computing (CSCE) plus the International Conference on Computational Science & Computational Intelligence (CSCI).
Schedule
- Keynote; 45 minutes
- Introduction to eXplainable AI; 45 Minutes
- Hands-on-Practice, 2 hours
- Computational Tasks:
- XAI in EHR Analysis and Prediction
- XAI in Medical Image Analysis and Prediction
Presenter: Prof. Varadraj Prabhu Gurupur, University of Central Florida
Duration: 2h; Prerequisites: None; Schedule: TBD
Cost: $150 IEEE Members / $300 Non-members / $100 Students
 Abstract. The workshop will focus on efforts made by the IEEE Standards ICAD workgroup on Data Quality of Electronic Health Records. The workgroup has the following goals: i) developing a method to create unique identifiers for each electronic healthcare vendor; thereby, identifying the electronic health record system used to create the electronic health record, ii) developing a methodology allowing each electronic health record vendor to create identifiers identifying the healthcare provider responsible for creating the electronic health record, iii) introduction of a system to measure the completeness of electronic health records, and iv) identify parameters for measuring the quality of electronic health records. The tutorial will focus on the critical progress made by this work group and invite comments and participation from the participants of the tutorial.
Abstract. The workshop will focus on efforts made by the IEEE Standards ICAD workgroup on Data Quality of Electronic Health Records. The workgroup has the following goals: i) developing a method to create unique identifiers for each electronic healthcare vendor; thereby, identifying the electronic health record system used to create the electronic health record, ii) developing a methodology allowing each electronic health record vendor to create identifiers identifying the healthcare provider responsible for creating the electronic health record, iii) introduction of a system to measure the completeness of electronic health records, and iv) identify parameters for measuring the quality of electronic health records. The tutorial will focus on the critical progress made by this work group and invite comments and participation from the participants of the tutorial.
Bio. Varadraj Gurupur, PhD is currently working as an Associate Professor with the School of Health Management and Informatics and has a joint appointment with the Department of Computer Science, and Department of Electrical and Computer Engineering with the University of Central Florida (UCF). He is also the founding member of the Decision Support Systems and Informatics Lab at UCF. Dr. Gurupur received his Doctoral degree in Computer Engineering from the University of Alabama at Birmingham in 2010. He has been actively involved with IEEE since 2009 and was elevated to senior member in 2017. He served as a conference chair for the IEEE Orlando section in 2018, as the secretary in 2019 and as a Vice Chair in 2020. Under his leadership the IEEE Orlando section has received the GOLD recognition from IEEE MGA. Dr. Gurupur is a recipient of two international awards, two national awards, and several regional and institutional awards. This includes the prestigious AHIMA Research Award in the year 2017, and the AHIMA Triumph Award for Innovation in 2021. His core research is focused on software engineering decision support systems for healthcare and education. Dr. Gurupur is also someone who has worked in the healthcare industry for several years. Based on this work experience and academic training he is involved in discovering innovative solutions to difficult problems associated with Electronic Health Records. Dr. Gurupur has more than 100 publications which include: edited book, book chapters, journal articles, conference papers, abstracts, and published reviews. Additionally, he has been involved in many research projects funded by the United States Federal government agencies such as National Science Foundation, and National Institutes of Health
Presenter: Prof. Sumit Chakravarty, Kennesaw State University
Duration: 4h; Prerequisites: None; Schedule: TBD
Cost: $300 IEEE Members / $600 Non-members / $200 Students
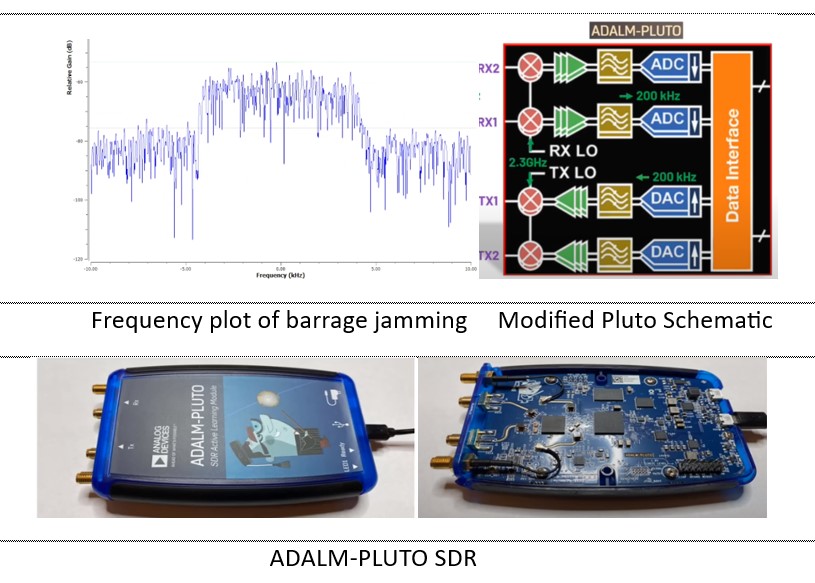
Abstract. This workshop on SDR Basics provides a forum for introducing Software Defined Radios primarily to Young Professionals, Undergraduate/Graduate students, and novice users of this tool. We plan to highlight the benefits of using SDR, showcase a few popular SDRs (RTL, Hack RF, Pluto), and provide hands-on interaction with these SDRs using interface platforms like GNU Radio and MATLAB. Additionally, we will discuss the potential use of SDRs in the next generation of communications by implementing wireless communication techniques like beamforming, beam jamming, and joint sensing/communication paradigms on SDRs.
Bio. Dr. Sumit Chakravarty currently works as an Associate Professor of Electrical Engineering with Kennesaw State University. He also serves as the MSECE program coordinator. He completed his doctoral studies from University of Maryland, Baltimore County and his Master of Science from Texas A&M University, Kingsville, both in Electrical Engineering. His PhD dissertation is on analysis of Hyperspectral Signatures and Data. He has multiple peer-reviewed journal publications, conference publications, a book chapter and three granted patents. His area of expertise is Wireless Communications, AI and Signal Processing.
Proposed Agenda:
- SDR theory and background
- Use of SDR in listening to common signals
- SDR capabilities and improvement
- SDR for radar signal jamming / anti-jamming
- Generating jamming signals/sending jamming signals
- Listening to jamming signals
- Analysis of jamming signals using Deep learning/ semantic communications
- Summary & Conclusions
Presenter: David Huggins, Georgia Tech Research Institute
Duration: 2h; Prerequisites: None; Schedule: TBD
Cost: $150 IEEE Members / $300 Non-members / $100 Students
Abstract. Cybersecurity for Critical Infrastructure provides a fundamental understanding of cybersecurity principles as applied to industrial sectors considered to be critical infrastructure. The tutorial provides a brief review of cybersecurity fundamentals, control system technologies, and applications to the different critical infrastructure technologies. Real world examples are provided to highlight the threat and discuss mitigation strategies.
Learning Goals:
- Understand cybersecurity principles relevant to critical infrastructure
- Illustrate the attack surface in various industry sectors
- Identify resources to improve defense of critical infrastructure
Presenter: Mr. Dan Nagle
Duration: 2h; Prerequisites: None; Schedule: TBD
Cost: $150 IEEE Members / $300 Non-members / $100 Student
 Abstract.A foundational component of communication between devices is the TCP/IP network stack. Web browsing, streaming video, secure control, and innumerable other applications are built upon this technology. This 3-part demonstration will use open source tools to focus on the data transfer components UDP and TCP while targeting an IoT device. Part 1 is reverse-engineering the network commands to better understand them and then mimic it (a common attack strategy). Network protocols will be discussed during this process. Armed with our new knowledge and skills, part 2 will take them a step further to discover and analyze malware present on the IoT device. Part 3 will cover fundamentals of network latency vs network throughput by forced network degradation. This presentation is light on slides and heavy on demos
Abstract.A foundational component of communication between devices is the TCP/IP network stack. Web browsing, streaming video, secure control, and innumerable other applications are built upon this technology. This 3-part demonstration will use open source tools to focus on the data transfer components UDP and TCP while targeting an IoT device. Part 1 is reverse-engineering the network commands to better understand them and then mimic it (a common attack strategy). Network protocols will be discussed during this process. Armed with our new knowledge and skills, part 2 will take them a step further to discover and analyze malware present on the IoT device. Part 3 will cover fundamentals of network latency vs network throughput by forced network degradation. This presentation is light on slides and heavy on demos
Bio. Dan Nagle has over 20 years of software development experience. He has written and published apps for desktop, mobile, servers, and embedded. He is the author and inventor of Packet Sender, an app used daily by security researchers, featured in manuals from major tech companies, and is taught in universities around the world. He is also the author of 2 network-related patents and a book published by CRC Press. His open source contributions have received international awards, and he has presented at many developer conferences about them.
Presenters: David Brown, Southwest Research Institute
Fadi Hantouli, US Department of Energy
Duration: 4h; Prerequisites: None; Schedule: TBD
Cost: $300 IEEE Members / $600 Non-members / $200 Student
Abstract. introduction to electronic warfare (EW) concepts and principles necessary for modern combat systems. The intent is to familiarize the audience with EW concepts and achieve an understanding of how EW is used to interrupt radar processing chains. This talk covers a general discussion on the EW field, including applications outside radar specific uses and terminology widely used within the field. A historical development of the EW field will be presented to motivate importance and historical use. Basic EW techniques (e.g. noise, range/velocity techniques, etc.) with associated effects on nominal radars will be presented/discussed to ensure an understanding of the technical underpinnings of EW. Building on the basic techniques, a brief discussion on concepts in advanced EW systems and current research will be presented. The discussion will conclude by briefly presenting the revolutionary impact of cognitive and AI/ML processes on EW.
The student will gain an understanding of the origin and intended goals of the EW field. In addition, system level considerations will be introduced. The student will gain insight into practical examples of introductory EW receiver and transmitter systems. The student will learn how open architecture designs are being applied to EW systems and will gain an appreciation of advanced topics in EW, including challenges of applying artificial intelligence / machine learning (AI/ML) algorithms to solve EW problems.
Bio. David Brown is a research engineer in the Defense & Intelligence Solutions Division at Southwest Research Institute (SwRI) where he is the lead engineer for advanced electronic warfare (EW) system research & development. His research interests are centered on applied cognitive EW, including methodologies to push AI/ML algorithms to the sensor edge, and smart data compression for congested data transport layers. Prior to joining SwRI, he held a variety of EW related research & development positions and was an adjunct professor at the Georgia Institute of Technology. In addition to engineering experience in EW, David developed experience in practical application of EW as a B-1B Electronic Warfare Officer (EWO). David received undergraduate and graduate training in electrical engineering from Georgia Tech as well as Master of Arts and Master of Divinity from Liberty University. David is a Distinguished Graduate of the Joint Electronic Warfare Officer School and is the recipient of the AOC EW.
Fadi Hantouli is a distinguished wireless communication engineer with a strong foundation in electrical engineering. His expertise encompasses designing, developing, and implementing advanced wireless solutions. Fadi possesses extensive knowledge of various wireless technologies, including 4G/LTE, 5G, and emerging technologies like 6G with AI integration. He optimizes network performance, expands coverage, and enhances data transmission speeds. Fadi’s exceptional problem-solving skills enable him to analyze complex network issues, execute thorough RF planning, and resolve intricate communication problems. He has hands-on experience working with industry-leading equipment and software, allowing him to efficiently manage network deployments, seamlessly integrate systems, and conduct comprehensive testing. Fadi’s track record demonstrates his ability to deliver exceptional results within tight timelines, driven by his meticulous attention to detail. He holds a Bachelor of Science in Electrical Engineering from Vanderbilt University and a Master’s degree in wireless communication from Kennesaw State University. He is currently pursuing his Ph.D. in the same field from Kennesaw State University.
Presenters: Richard Wise, Georgia Tech Research Institute
Michael Shearin, Georgia Tech Research Institute
Duration: 4h; Prerequisites: Knowledge of Systems Engineering is preferred but not necessary; Schedule: TBD
Cost: $300 IEEE Members / $600 Non-members / $200 Student
Abstract. This tutorial will give students a brief introduction to Model-Based Systems Engineering (MBSE). Attendees will gain a pragmatic understanding of what it means to employ a model-based approach within an organization to achieve business value. A practical example will be introduced and worked throughout the tutorial to demonstrate how to implement a MBSE approach. A common systems engineering activity, e.g. synthesis and sizing, involving domain subject-matter experts will be exercised via a digital thread. After completing this tutorial, attendees will be able to discuss the key considerations in developing an MBSE implementation as well and explain how a digital thread is used to enable more effective decision making.
Some of this tutorial material will be based on the Introduction to MBSE short course offered by Georgia Tech Professional Education. More information on this course can be found here: https://pe.gatech.edu/courses/introduction-model-based-systems-engineering
Bio:
Richard Wise is a Senior Research Engineer at GTRI where he leverages his passion and experience in MBSE to research, educate, and lead teams in the design, analysis, and verification and validation of complex and open systems. He is the instructor for the Systems Modeling with SysML course in the Professional Masters in Applied Systems Engineering graduate degree program at Georgia Tech as well as co-instructor for several professional education short courses. His research interests include concept formulation and expression via meta-models and modeling languages; open system and enterprise architectures; and modeling frameworks, patterns, and libraries.
Mike Shearin is a MBSE practitioner and leader at GTRI, advancing the state of MBSE-related research, deployment, and teaching. He has been active in the DoD contracting space since 2004 when he started as a computer engineer developing both hardware and software for flight display systems. He then transitioned to a systems engineering role in 2011, expanding into MBSE at GTRI in 2014. Advancing the state-of-the-art of MBSE, applying it to challenging SE problems, and educating future practitioners are what motivates Mike in his work at GTRI. His current focus is on applying MBSE to enterprise data architectures and developing MBSE and Digital Engineering environments. Mike holds a B.S. degree in Computer Engineering and a Professional M.S. degree in Applied Systems Engineering (PMASE), both from Georgia Tech, and currently serves as the branch head of the Digital Engineering Tools and Environments Branch in the Systems Engineering Research Division. He also serves as an instructor in the PMASE program and other professional education courses.